
سلام من l298n دارم برد uno اگه میشه یکی برام برنامشو بنویسه که بتونم سرعت هم کنترل کنم ماژول بلوتوث هم دارم همه وصلا و درست کار میکنن فقط برنامه ندارم من گشتم تو یوتوب ولی نفهمیدم دقیقا پین ها به چی وصله
این الان همون چیزیه که من میخوام https://www.youtube.com/watch?v=klrDAzK0jKY&t=137s لامپ اینا مهم نیس همون موتور عقبش که قابلیت تنظیم سرعت داره برام مهمه
اینم لینک سایتش
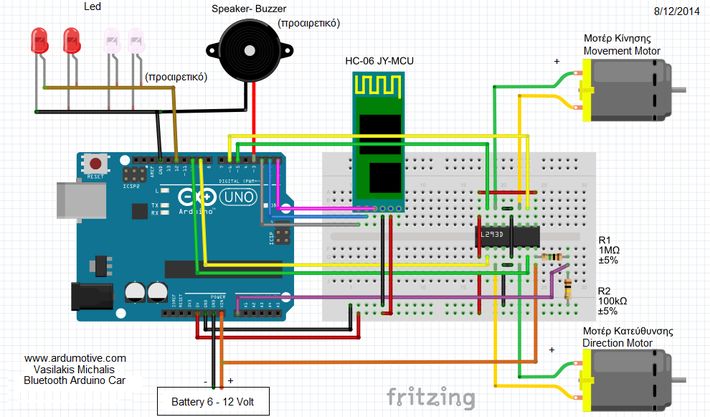
دقیق مشخص نیست که چطوری به ال 298 وصله
اینم کدیه که تو اون هست
این الان همون چیزیه که من میخوام https://www.youtube.com/watch?v=klrDAzK0jKY&t=137s لامپ اینا مهم نیس همون موتور عقبش که قابلیت تنظیم سرعت داره برام مهمه
اینم لینک سایتش

دقیق مشخص نیست که چطوری به ال 298 وصله
کد:
[FONT=Yekan]/*[/FONT] * Created by Vasilakis Michalis // 12-12-2014 ver.2
* Project: Control RC Car via Bluetooth with Android Smartphone
* More information at www.ardumotive.com
*/
//L293 Connection
const int motorA1 = 5; // Pin 2 of L293
const int motorA2 = 6; // Pin 7 of L293
const int motorB1 = 10; // Pin 10 of L293
const int motorB2 = 9; // Pin 14 of L293
//Leds connected to Arduino UNO Pin 12
const int lights = 12;
//Buzzer / Speaker to Arduino UNO Pin 3
const int buzzer = 3 ;
//Bluetooth (HC-06 JY-MCU) State pin on pin 2 of Arduino
const int BTState = 2;
//Calculate Battery Level
const float maxBattery = 8.0;// Change value to your max battery voltage level!
int perVolt; // Percentage variable
float voltage = 0.0; // Read battery voltage
int level;
// Use it to make a delay... without delay() function!
long previousMillis = -1000*10;// -1000*10=-10sec. to read the first value. If you use 0 then you will take the first value after 10sec.
long interval = 1000*10; // interval at which to read battery voltage, change it if you want! (10*1000=10sec)
unsigned long currentMillis; //unsigned long currentMillis;
//Useful Variables
int i=0;
int j=0;
int state;
int vSpeed=200; // Default speed, from 0 to 255
void setup() {
// Set pins as outputs:
pinMode(motorA1, OUTPUT);
pinMode(motorA2, OUTPUT);
pinMode(motorB1, OUTPUT);
pinMode(motorB2, OUTPUT);
pinMode(lights, OUTPUT);
pinMode(BTState, INPUT);
// Initialize serial communication at 9600 bits per second:
Serial.begin(9600);
}
void loop() {
//Stop car when connection lost or bluetooth disconnected
// if(digitalRead(BTState)==LOW) { state='S'; }
//Save income data to variable 'state'
if(Serial.available() > 0){
state = Serial.read();
}
//Change speed if state is equal from 0 to 4. Values must be from 0 to 255 (PWM)
if (state == '0'){
vSpeed=0;}
else if (state == '1'){
vSpeed=100;}
else if (state == '2'){
vSpeed=180;}
else if (state == '3'){
vSpeed=200;}
else if (state == '4'){
vSpeed=255;}
/***********************Forward****************************/
//If state is equal with letter 'F', car will go forward!
if (state == 'F') {
analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
/**********************Forward Left************************/
//If state is equal with letter 'G', car will go forward left
else if (state == 'G') {
analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0);
analogWrite(motorB1, 200); analogWrite(motorB2, 0);
}
/**********************Forward Right************************/
//If state is equal with letter 'I', car will go forward right
else if (state == 'I') {
analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 200);
}
/***********************Backward****************************/
//If state is equal with letter 'B', car will go backward
else if (state == 'B') {
analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
/**********************Backward Left************************/
//If state is equal with letter 'H', car will go backward left
else if (state == 'H') {
analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed);
analogWrite(motorB1, 200); analogWrite(motorB2, 0);
}
/**********************Backward Right************************/
//If state is equal with letter 'J', car will go backward right
else if (state == 'J') {
analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed);
analogWrite(motorB1, 0); analogWrite(motorB2, 200);
}
/***************************Left*****************************/
//If state is equal with letter 'L', wheels will turn left
else if (state == 'L') {
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, 200); analogWrite(motorB2, 0);
}
/***************************Right*****************************/
//If state is equal with letter 'R', wheels will turn right
else if (state == 'R') {
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 200);
}
/************************Lights*****************************/
//If state is equal with letter 'W', turn leds on or of off
else if (state == 'W') {
if (i==0){
digitalWrite(lights, HIGH);
i=1;
}
else if (i==1){
digitalWrite(lights, LOW);
i=0;
}
state='n';
}
/**********************Horn sound***************************/
//If state is equal with letter 'V', play (or stop) horn sound
else if (state == 'V'){
if (j==0){
tone(buzzer, 1000);//Speaker on
j=1;
}
else if (j==1){
noTone(buzzer); //Speaker off
j=0;
}
state='n';
}
/************************Stop*****************************/
//If state is equal with letter 'S', stop the car
else if (state == 'S'){
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
/***********************Battery*****************************/
//Read battery voltage every 10sec.
currentMillis = millis();
if(currentMillis - (previousMillis) > (interval)) {
previousMillis = currentMillis;
//Read voltage from analog pin A0 and make calibration:
voltage = (analogRead(A0)*5.015 / 1024.0)*11.132;
//Calculate percentage...
perVolt = (voltage*100)/ maxBattery;
if (perVolt<=75) { level=0; }
else if (perVolt>75 && perVolt<=80) { level=1; } // Battery level
else if (perVolt>80 && perVolt<=85) { level=2; } //Min ------------------------ Max
else if (perVolt>85 && perVolt<=90) { level=3; } // | 0 | 1 | 2 | 3 | 4 | 5 | >
else if (perVolt>90 && perVolt<=95) { level=4; } // ------------------------
else if (perVolt>95) { level=5; }
Serial.println(level);
}
}
اینم کدیه که تو اون هست


دیدگاه