

تصویر روبرو make را نشان می دهد  cmake-gui.exe
cmake-gui.exe
cmake-gui.exe
cmake-gui.exe
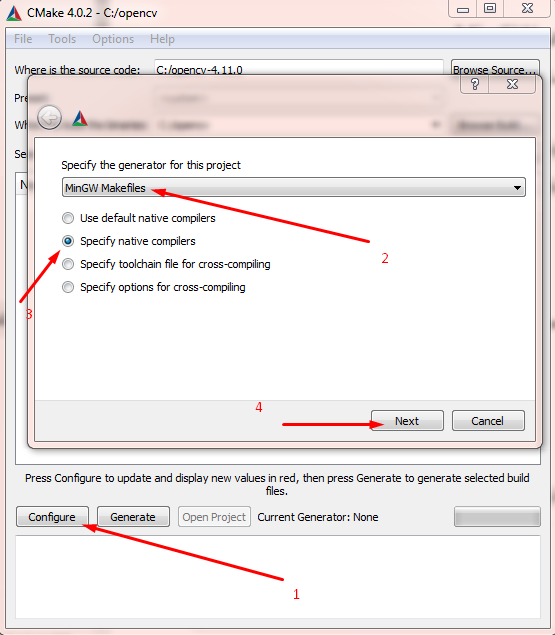 من ویندوز 7 هستم . برای کدبلوک می خوام خرت و پرت بسازم از سورس opencv
من ویندوز 7 هستم . برای کدبلوک می خوام خرت و پرت بسازم از سورس opencv
mingw32-make
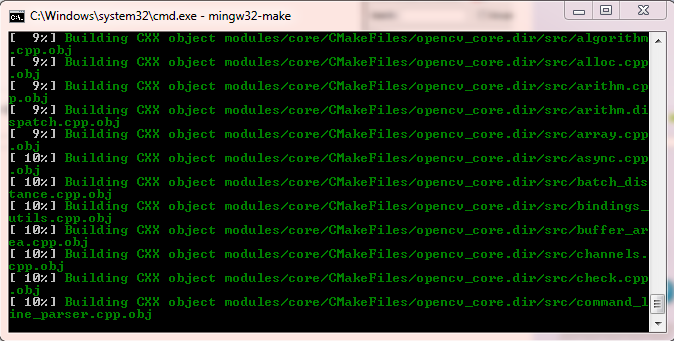
mingw32-make install

 هنوز کامپایل تمام نشده. شاید کامپیوتر من کندتر باشد.
هنوز کامپایل تمام نشده. شاید کامپیوتر من کندتر باشد.mingw32-make install



 چند عکس تزئینی:
چند عکس تزئینی:
 رزبری پای wall e ربات چهار پا
رزبری پای wall e ربات چهار پا
دیدگاه