

یک مبدل usb به سریال برای برنامه ریختن در این برد esp32 cam میشه استفاده کرد.
و از اردوینو ide هم برای ارسال برنامه به عنوان نرم افزار در کامپیوتر میشه استفاده کرد.
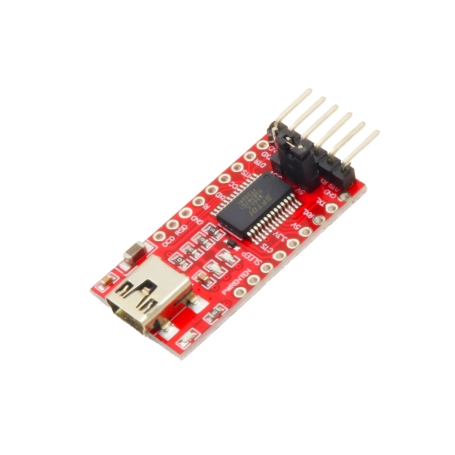
ftdi نام مبدل است.
در تاپیک زیر درایور ftdi هست . اونجا که نوشته برای آیندگان

در لینوکس هم خودش ftdi را فکر کنم بشناسد و شاید درایور نخواهد.
و از اردوینو ide هم برای ارسال برنامه به عنوان نرم افزار در کامپیوتر میشه استفاده کرد.
ftdi نام مبدل است.
در تاپیک زیر درایور ftdi هست . اونجا که نوشته برای آیندگان
در لینوکس هم خودش ftdi را فکر کنم بشناسد و شاید درایور نخواهد.









دیدگاه